Demos¶
Sampling by calling the Python API¶
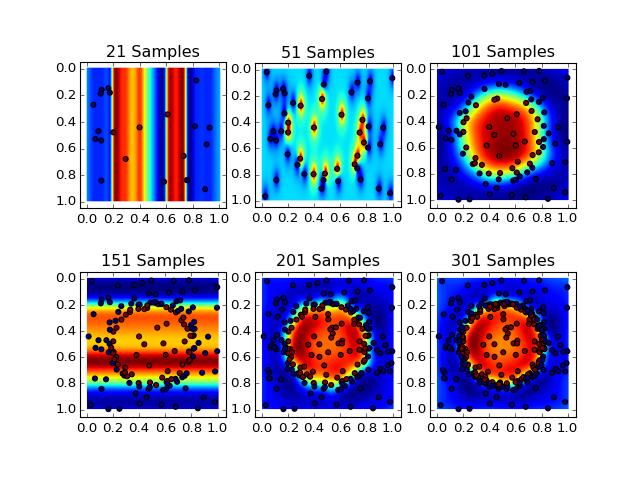
In this demo, we use the active sampling Python API to learn a Gaussian Process model. We collect some initial randomly located training data with noisy targets y_train and inputs X_train for the purpose of selecting initial model hyperparameters, and proceed to use targeted sampling to efficiently continue the exploration. The sampling distribution and the corresponding model are shown at various stages of data acquisition.
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
References¶
| [1] | Carl Edward Rasmussen and Christopher KI Williams "Gaussian processes for machine learning." the MIT Press 2.3 (2006): 4. |