|
Obsidian
Probabilistic Geophysical Joint Inversion
|


|
|
Obsidian
Probabilistic Geophysical Joint Inversion
|
|
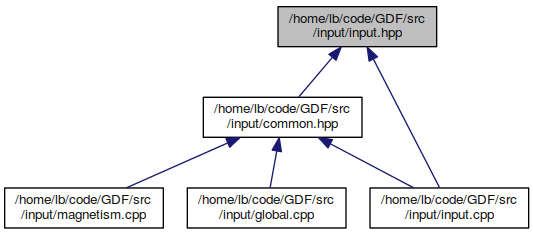
Input constructs for problem specification. More...
#include <boost/program_options.hpp>#include <glog/logging.h>#include "datatype/datatypes.hpp"#include "prior/prior.hpp"#include "datatype/sensors.hpp"#include "app/settings.hpp"#include "serial/serial.hpp"#include "fwdmodel/fwd.hpp"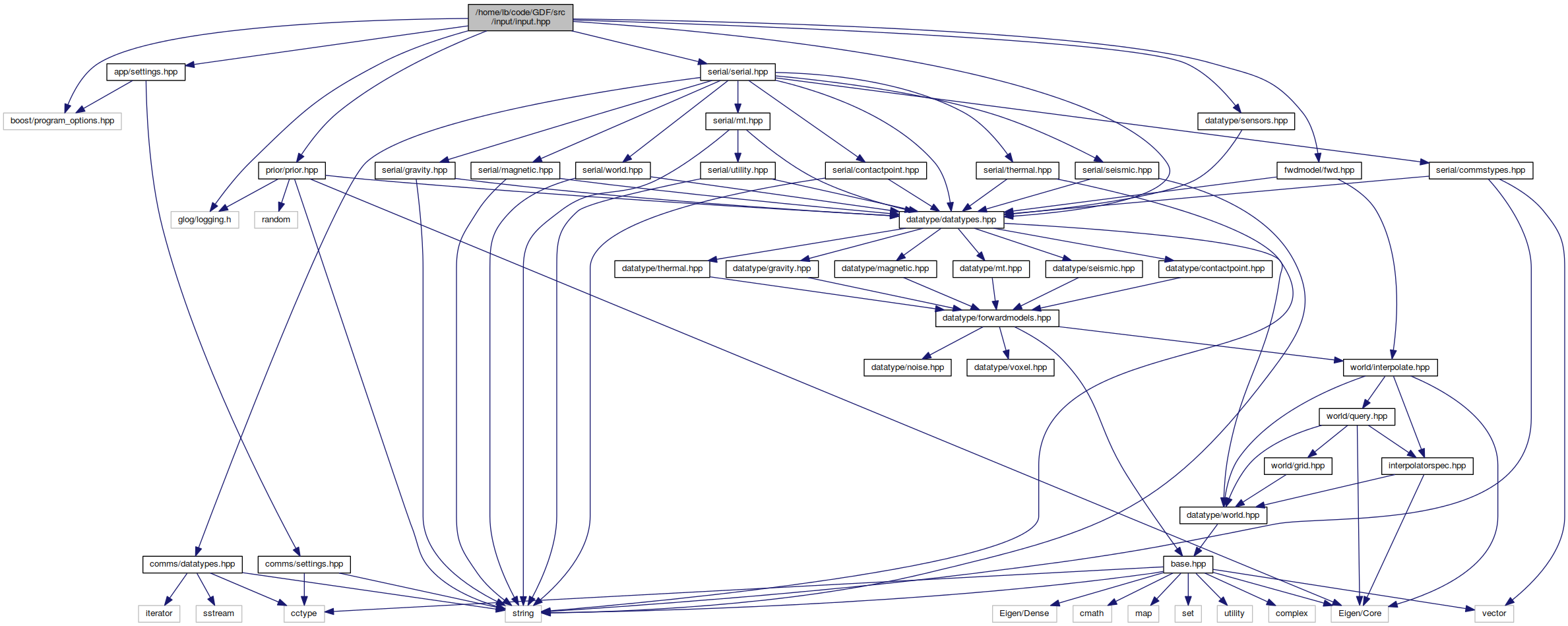
Namespaces | |
| obsidian | |
Functions | |
| void | obsidian::readInputFile (const std::string &inputFilename, po::variables_map &vm) |
| Read input.obsidian file. | |
| void | obsidian::initWorldOptions (po::options_description &options) |
| Initialise options for the world model. | |
| void | obsidian::initMCMCOptions (po::options_description &options) |
| Initialise options for mcmc. | |
| template<ForwardModel f> | |
| void | obsidian::initSensorInputFileOptions (po::options_description &add_options) |
| Initialise options for a specific forward model to read from input.obsidian or write to output.gdf. | |
| stateline::MCMCSettings | obsidian::parseMCMCSettings (const po::variables_map &vm) |
| Parse mcmc settings from loaded input.obsidian file. | |
| std::set< ForwardModel > | obsidian::parseSensorsEnabled (const po::variables_map &vm) |
| Parse which sensors are enabled from loaded input.obsidian file. | |
| template<ForwardModel f> | |
| std::string | obsidian::configHeading () |
| Determine which section in input.obsidian we should read settings of a ForwardModel from. | |
| template<typename SensorPrior > | |
| SensorPrior | obsidian::parsePrior (const po::variables_map &vm, const std::set< ForwardModel > &sensorsEnabled) |
| Parse a Prior Object from input.obsidian. | |
| template<typename SensorSpec > | |
| SensorSpec | obsidian::parseSpec (const po::variables_map &vm, const std::set< ForwardModel > &sensorsEnabled) |
| Parse a spec object from input.obsidian. | |
| template<typename SensorParams > | |
| SensorParams | obsidian::parseSimulationParams (const po::variables_map &vm, const std::set< ForwardModel > &sensorsEnabled) |
| Parse a params object from input.obsidian. More... | |
| template<typename SensorParams > | |
| std::vector< SensorParams > | obsidian::parseInitStates (const po::variables_map &vm, const WorldSpec &spec, const std::set< ForwardModel > &sensorsEnabled) |
| Parse initial state of for each stack from input.obsidian. | |
| template<typename SensorResult > | |
| SensorResult | obsidian::parseSensorReadings (const po::variables_map &vm, const std::set< ForwardModel > &sensorsEnabled) |
| Parse a Result Object from input.obsidian. | |
| template<typename Object > | |
| po::variables_map | obsidian::write (const std::string &prefix, Object spec, const po::options_description &vm) |
| Write a object into output.gdf. | |
| bool | obsidian::isSimulation (const po::variables_map &vm) |
| Determine if input.obsidian wants us to run our simulation for generating results objects for read them form input.obsidian. | |
| template<ForwardModel f> | |
| void | obsidian::enableProperties (Eigen::VectorXi &propMasksMask) |
| Determine which properties are used by which forward model. | |
| bool | obsidian::validateWorld (const WorldSpec &world, const WorldParams ¶m) |
| Method called for validating world spec and parameters. | |
| template<typename Spec , typename Result > | |
| bool | obsidian::validateSensor (const WorldSpec &world, const Spec &spec, const Result &result) |
| Method called for validating world spec and parameters. | |
Input constructs for problem specification.
 1.8.7
1.8.7